Industrial Robotics
Content
Los mejores métodos para le uso de Sensores de Visión 2D en la Paletización
by Uso de Sensores 2D en la Paletización
GUREGO SA DE CV
Posted 15/02/2021
Los mejores métodos para el uso de sensores Vision 2D en la paletización.
La optimización de procesos en la paletización y despaletización requiere una escrupulosa planificación y, quizá, un poco de maña jugando al Tetris. Durante estos procesos se apilan cajas de distintas formas y tamaños unas sobre otras, lo que hace imprescindible la creación de una disposición adecuada.

En la mayoría de las operaciones de suministro, si no en todas, se utilizan tarimas para transportar varios artículos de un modo eficiente de un lugar a otro. Sin embargo, no existe una opinión unánime de cómo ha de ser una paletización óptima. Algunos fabricantes apuestan por métodos de paletización manuales, mientras que otros utilizan robots o métodos automatizados.
Independientemente de la estrategia de paletización empleada, el objetivo de cualquier operación de suministro consiste en enviar el máximo número de productos posible de una vez. Para ello es imprescindible aprovechar al máximo el espacio disponible en cada tarima, incluso aunque solo se cargue un paquete adicional.
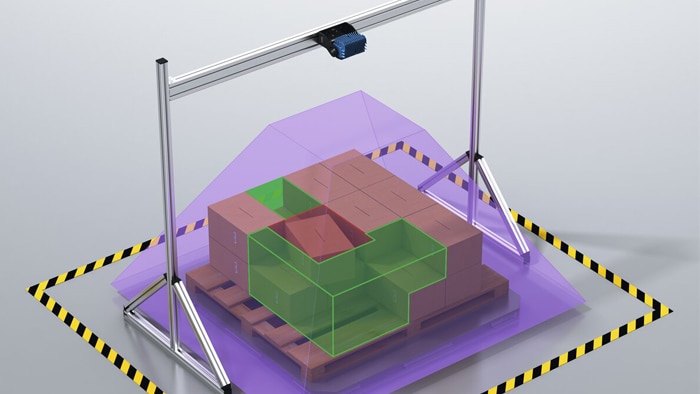
SICK ofrece una solución que optimiza sus métodos de paletización y despaletización y que le permite incrementar su rendimiento sin costes de transporte adicionales. Visionary-T es un sensor Visión 3D que registra una instantánea de un palé. De este modo podrá ver si existen posiciones incompletas o si hay objetos mal orientados y podrá comprobar si un palé se encuentra en la posición correcta. Con el Visionary-T optimizará sus procesos de paletización con el mínimo esfuerzo.

Datos 3D estáticos para la optimización de la paletización
Puesto que la cámara está colocada sobre su palé, podrá comprobar en vista aérea si hay huecos libres o si el palé está completamente lleno y listo para cargarse en el camión. Con ayuda de Visionary-T es posible comprobar si aún hay sitio libre o no en el palé. Seguidamente, el robot puede desplazarse con precisión a la posición en la que debe depositar una caja.
Puede instalarse de forma fija directamente sobre el palé. Además ocupa un espacio mínimo y puede parametrizarse fácilmente una vez se encuentra sobre el palé. Puesto que usted obtiene una imagen estática del palé, no necesita instalar sensores adicionales como encoders o sensores de seguridad para controlar el movimiento.
En cuanto haya detectado posibles huecos libres en el palé, puede ejecutar otras operaciones “pick & place” de precisión y colocar más artículos en las posiciones libres. Puede comunicar a un robot por medio de una instantánea 3D exactamente dónde debe depositar el paquete. Esto ahorra tiempo y dinero puesto que el robot no tiene que escanear ya el palé completo de arriba a abajo en busca de huecos libres.