

CATALOGO DE PRODUCTO
rc_reason ItemPick Software Module
Roboception GmbHActualizado 08/09/2023
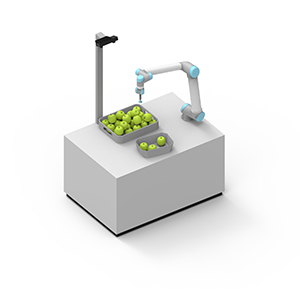
El módulo ItemPick de rc_reason es una solución para aplicaciones robóticas de recogida y colocación que utilizan garras de ventosa: Calcula las posturas de agarre de la superficie de un dispositivo de succión en un objeto determinado. Este componente de software puede activarse fácilmente a bordo del sensor estéreo rc_visard de Roboception y manejarse a través de la interfaz estándar del sensor: Equipado con el módulo ItemPick, el rc_visard calcula un número configurable de poses de agarre para un dispositivo de succión en todos los objetos identificados dentro de un espacio de trabajo predefinido.
- Detección fiable de superficies planas en los objetos
- Funciona con sensores estáticos y montados en robots
- Procesamiento de datos integrado: No requiere hardware externo
- Listo para usar: Fácil instalación y funcionamiento
Se propone un orden de agarre (que el operario puede modificar fácilmente), y cada agarre sugerido incluye un valor de calidad relacionado con la superficie disponible para el agarre. Dado que el tamaño del dispositivo de ventosa seleccionado puede especificarse individualmente, ItemPick puede utilizarse con cualquier dispositivo de ventosa común.
Además, funciona con cualquier tipo de objeto. La definición del espacio de trabajo se realiza de forma automática (detectando, por ejemplo, un contenedor) o manual (definiendo un área de interés). Otra opción es utilizar el componente de calibración manual del sensor (para evitar pasos adicionales de transformación entre el sensor y el robot).
Los programas Java de ejemplo facilitan la integración con los controladores del robot. Las aplicaciones ItemPick pueden optimizarse equipando el rc_visard con un proyector y el correspondiente módulo de control IO. Esta mejora se recomienda en particular para objetos o espacios de trabajo difíciles.
SOLICITAR COTIZACIÓN
